Régulateur de la machine de mesure de la vision à 4 axes général
Introduction au projet
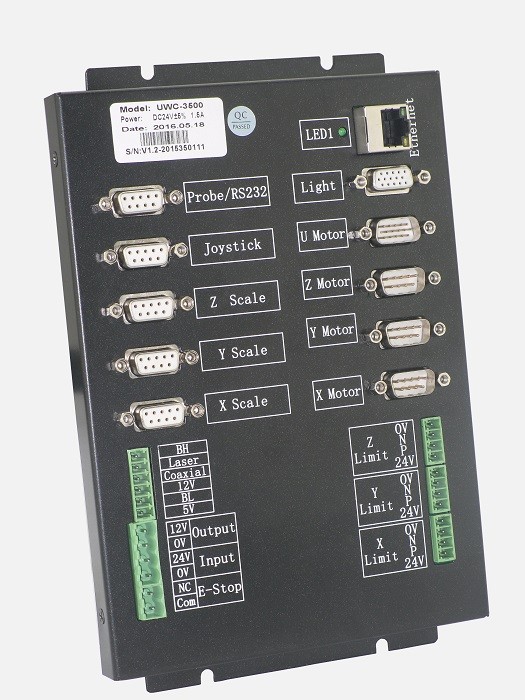
UWC 3500 est un contrôleur à boucle fermée à quatre axes général, utilisé dans les machines de mesure de la vision et les machines de mesure de la vision composite, ou les systèmes de mesure d'automatisation.Avec rétroaction de position en boucle fermée de l'échelle linéaire ou du moteur encodeur, l'UWC3500 est capable d'atteindre une grande précision.
Caractéristiques:
1- Structure de machine supérieure et inférieure avancée, CPU+FPGA haute performance
2.Communication: interface Ethernet, le temps de fonctionnement d'une seule fonction API est inférieur à 0,45 ms.
3. Mode de commande Direction+Pulse, capable de contrôler les moteurs pas à pas, le servo CA, le servo linéaire ou le DDM, etc.
4. Contrôle complet du mouvement en boucle fermée, localisation de haute précision qui est rapide, précise et stable. Algorithme de contrôle en boucle fermée avancé et très peu de paramètres PID, assurent un tournage facile pour les utilisateurs.
5. Le plan de courbe de vitesse de type S, le rapport de section S dans le processus de décélération peut être réglé.
6Stratégie de localisation:
Contrôle en boucle ouverte impulsion + direction.
Contrôle en boucle fermée de la rétroaction de l'échelle linéaire/position du codeur, algorithme amélioré PID+VFF, éliminant le problème de déplacement zéro.
7Mode de mouvement:
Point à point, mode JOG, mode homing facile à utiliser et flexible, interpolation linéaire à 2 ou 3 axes, interpolation à arc horizontal, sonde tactile et mode joystick.
8Politique de sécurité:
fonction d'ajustement automatique de la rotation de la machine, réglage automatique de la logique et de la direction des limites, des paramètres des moteurs et de la direction de rétroaction linéaire,s'assurer d'éliminer l'erreur de mouvement de rétroaction.
Lorsque l'axe se déplace près de la limite, il y a une décélération avancée, et avant le redressement, il y a une restriction forcée de la vitesse de déplacement.
Le logiciel est pris en charge.
9. La fonction API utilise l'encapsulation face à l'objet, ce qui offre une programmation facile.
10- Haute intégration, haute performance, production et maintenance stables et faciles.
11L'UWC-3500 utilise la technologie de production SMT, assurant la stabilité et la fiabilité.
12. Avec une grande flexibilité, l'UWC3500 s'adapte aux équipements non standard et peut également être personnalisé.
13. L'UWC3500 prend en charge la fonction de mise à jour du firmware en ligne, les utilisateurs n'ont pas à retirer le contrôleur de la machine, facile à mettre à jour et à étendre la fonction,réduire le cycle de développement et de tournage de l'équipement.
14Module externe UWC348 IO, maximum pour 26 dans 26 à l'extérieur.
15. Fonction de correspondance de comparaison de position, qui peut être correspondue avec précision, les utilisateurs peuvent également définir la plage de déclenchement de correspondance, la sortie de déclenchement peut être connectée à la caméra ou au capteur laser.
16Fonction de commande de la source lumineuse stroboflash opérationnelle et fonction de déclenchement correspondant à la position du CCD.
17. Un puissant logiciel de débogage inclus, un fonctionnement facile, facile pour les utilisateurs de tourner la machine.
Paramètres
| Nom de l'article |
Je ne sais pas.
|
Typique
|
- Je vous en prie.
|
Unité
|
| Temps de fonctionnement de l'API |
0.425
|
0.43
|
0.45
|
ms
|
| Voltage de puissance d'entrée |
22.5
|
24
|
26
|
VDC
|
| Voltage de sortie de puissance auxiliaire de 12 V |
11.76
|
12.05
|
12.24
|
VDC
|
| 12 V de courant de sortie de puissance auxiliaire |
0
|
2.0
|
2.5
|
Une
|
| Voltage de sortie de puissance de 5 V |
5.1
|
5.2
|
5.25
|
VDC
|
| Le courant de sortie de puissance 5V |
0
|
1.8
|
2.0
|
Une
|
| Interface moteur X/Y/Z capacité de charge 24V |
0
|
3.0
|
4.0
|
Une
|
| Fréquence d'impulsion de direction |
-
|
-
|
6.5
|
fréquences de fréquence
|
| Résolution de fréquence |
0.006
|
-
|
-
|
Hz
|
| Plage de comptage à échelle linéaire |
- Je ne sais pas.
|
-
|
2147483647
|
Les CNT
|
| Plage de comptage des impulsions de direction |
- Je ne sais pas.
|
-
|
2147483647
|
Les CNT
|
| Niveau de réglage de la vitesse |
-
|
-
|
1,000,000,000
|
DDS 32 bits
|
| Résolution à échelle linéaire prise en charge |
- Je ne sais pas.01
|
-
|
10000
|
Je ne sais pas.
|
| Fréquence de sortie du signal à échelle linéaire |
-
|
-
|
6.5
|
fréquences de fréquence
|
| Entrée/sortie générale du contrôleur |
-
|
-
|
-
|
Le terminal
|
| Interface de communication RS232 haute vitesse |
-
|
2
|
-
|
Le terminal
|
| Entrée / sortie interne externe (en utilisant une interface de communication RS232) |
-
|
24 heures sur 24
|
-
|
Le terminal
|
| Courant de sortie de conduite par étape |
0.07
|
-
|
1.15
|
A (RMS)
|
| Subdivision de conduite par étape |
16
|
16
|
16
|
|
Spécification
| Je ne veux pas. |
Spécification
|
UWC3500
|
| 1 |
L'approvisionnement en électricité
|
La puissance de sortie est calculée en fonction de la puissance de sortie de l'appareil.
|
| 2 |
Mesure de la compatibilité des logiciels
|
Compatible avec le V1.4
|
| 3 |
Dimension
|
255 * 118 * 53 mm
|
| 4 |
La communication
|
USB ou Ethernet isolé (facultatif)
|
| 5 |
politique de contrôle en boucle fermée
|
PID+VFF+ bande morte
|
| 6 |
Fréquence de rafraîchissement par servo
|
2.5KHz
|
| 7 |
Anti-choc mécanique, optimiser la vitesse
|
Mode SMART
|
|
| 8 |
Axe de comptage du transducteur linéaire
|
3
|
|
| 9 |
Axe de commande de base
|
4
|
|
| 10 |
Dépenses de l'axe
|
Capable d'ajouter 3 axes impulsion+direction
|
|
| 11 |
Mode de commande de l'axe XYZ
|
Pouls + direction RS422
|
|
| 12 |
Type de moteurs à axes XYZ (avec moteur externe)
|
Servo pas à pas/servo CA/servo linéaire/servo CC avec rétroaction du codeur
|
|
| 13 |
Mode de commande de l'axe U A
|
RS232 se connecte à l'objectif de zoom automatique Pomeas
|
|
| 14 |
Mode de commande de l'axe U
|
2 phases step driver est intégré, qui soutiennent l'objectif de zoom automatique avec les moteurs step, les limites single/duo sont prises en charge.
|
|
| 15 |
Planification de la courbe de vitesse
|
Type échelle/S
|
|
| 16 |
Interpolation
|
Interpolation linéaire sur plusieurs axes, interpolation par arc sur deux axes, interpolation sur trois axes
|
| 17 |
Fréquence maximale des pulsations
|
5 MHz
|
|
| 18 |
Résolution de fréquence d'impulsion
|
00,001 Hz
|
|
| 19 |
Niveau de réglage de la vitesse
|
1,000,000,000
|
|
| 20 |
Contrôle de tension analogique
|
-
|
|
| 21 |
Fréquence de comptage du transducteur linéaire
|
6MHz/ (Phase A ou B)
|
|
| 22 |
Définition du signal du transducteur linéaire
|
R ou S pour optionnel (R:12345, S:26789)
|
|
| 23 |
Matériel de mesure des sondes
|
Circuit d'interface de la sonde tactile
|
|
| 24 |
Circuit de traitement des erreurs de la sonde
|
Disponible, réparation automatique de la sonde nonhoming
|
|
| 25 |
Probes compatibles
|
Renishaw/Tesa toutes les séries de démarreur de la sonde de contact
|
|
| 26 |
Module de traitement des sondes
|
Fermeture à grande vitesse de la sonde, point de contact de commande joystick, pause automatique et retraite automatique, mode de point de détection automatique
|
|
| 27 |
Carte de collecte de signaux joystick intégrée
|
Résolution de 12 bits, entrée de tension analogique de 0 à 5 V, 3 boutons pressés et 3 LED, interrupteur d'arrêt d'urgence inclus, bouton de réglage de vitesse inclus (utilisé de manière mutuellement exclusive avec le bouton 3#)
|
|
| 28 |
Carte de commande d'éclairage intégrée
|
Lumière de surface de section 8 + lumière de fond + lumière coaxiale, réglage logiciel de niveau 0-200
|
|
| 29 |
Fonction de réglage du niveau d'éclairage
|
Réglage matériel de 16 niveaux dans la base de réglage des paramètres sur la luminosité requise
|
|
| 30 |
capacité de commande de la lumière de contour / commande du banc LED
|
Max. 420mA, adapté à la plupart des grandes machines de voyage
|
|
| 31 |
Interface extérieure d'éclairage de type compliqué
|
Capable de se connecter à une lumière programmable à couleur unique de 5 anneaux de 8 sections, ou à une lumière programmable à couleur de 5 anneaux de 8 sections de 4 couleurs, lumière élevée / rotative
|
|
| 32 |
Interface d'entrée/sortie générale
|
8 sections d'entrée isolée, 5 sorties (compatibles avec l'ULN2803)
|
|
| 33 |
Horloge du système
|
Année-mois-jour-heure-minute-seconde, ne peut être modifié
|
|
| 34 |
Mise à niveau du micrologiciel
|
Mise à niveau du client sur place, solution rapide et mise à jour technique.
|
|
| 35 |
Connecteur de sonde
|
Connecteur D-DUB à 9 broches, plus facile à brancher et plus stable
|
|
| 36 |
Connecteur joystick
|
OTP6, OTP7, HC3 ((Joystick à plusieurs touches)
|
|
| 37 |
Traitement des données du joystick
|
Le contrôleur traite en interne les données du joystick et le contrôle du mouvement, mutuel avec l'autre mode de contrôle du mouvement, la sonde du joystick touchant avec arrêt automatique et retraite automatique
|
|
| 38 |
Arrêt d'urgence externe
|
Le bouton d'arrêt d'urgence contrôle l'alimentation du moteur
|
|
| 39 |
Planification de la courbe de vitesse
|
Escalier / type S
|
|
| 40 |
Commutateur de limite logicielle
|
Disponible
|
|
| 41 |
Point de décélération du logiciel
|
Disponible
|
|
| 42 |
Distance de freinage désignée
|
Disponible
|
|
| 43 |
Logiciel de débogage pris en charge
|
V4.0 ou version ultérieure (détection et réglage automatiques du paramètre)
|
|

 Votre message doit contenir entre 20 et 3 000 caractères!
Votre message doit contenir entre 20 et 3 000 caractères!